Publications
Publications
(c) Milinkovitch 2012
, , , , , 3D Printing Materials for Soft Robotics. Adv. Mater. 2021, 33, 2003387. |
Read more |
Bianchi, D., Antonelli, M., Laschi, C., Falotico, E., Open-loop Control of a Soft Arm in Throwing Tasks. Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics - ICINCO. 2022, pages 138-145. |
Read more |
Piqué, F., Kalidindi, H.T., Fruzzetti, L., Laschi, C., Menciassi, A., Falotico, E., Controlling Soft Robotic Arms Using Continual Learning, in IEEE Robotics and Automation Letters. 2022 vol. 7, no. 2, pp. 5469-5476 |
Read more |
Lo Preti, M., Totaro, M., Falotico, E., Crepaldi, M., Beccai, L., Online Pressure Map Reconstruction in a Multitouch Soft Optical Waveguide Skin, in IEEE/ASME Transactions on Mechatronics. |
Read more |
Muñoz, J., Piqué, F., A. Monje, C., Falotico, E., Robust Fractional-Order Control Using a Decoupled Pitch and Roll Actuation Strategy for the I-Support Soft Robot Mathematics 2021, 9, 702. |
Read more |
Centurelli, A., Arleo, L., Rizzo, A., Tolu, S., Laschi, C., Falotico, E., Closed-Loop Dynamic Control of a Soft Manipulator Using Deep Reinforcement Learning, in IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4741-4748. |
Read more |
Centurelli, A., Rizzo, A., Tolu, S., Falotico, E., Open-loop Model-free Dynamic Control of a Soft Manipulator for Tracking Tasks, 20th International Conference on Advanced Robotics (ICAR), 2021, pp. 128-133. |
Read more |
Thuruthel, T. G., Falotico, E., Beccai, L., Iida, F., Editorial: Machine Learning Techniques for Soft Robots, Front. Robot. AI, Sec. Soft Robotics. 2021, 8. |
Read more |
Joe, S., Wang, H., Totaro, M., Beccai, L., Sensing Deformation in Vacuum Driven Foam-Based Actuator via Inductive Method, Front. Robot. AI, Sec. Soft Robotics. 2021, 5. |
Read more |
Joe, S., Bernabei, F., Beccai, L., A Review on Vacuum-Powered Fluidic Actuators in Soft Robotics, in Rehabilitation of the Human Bone-Muscle System (ed. Adrian Olaru), IntechOpen. |
Read more |
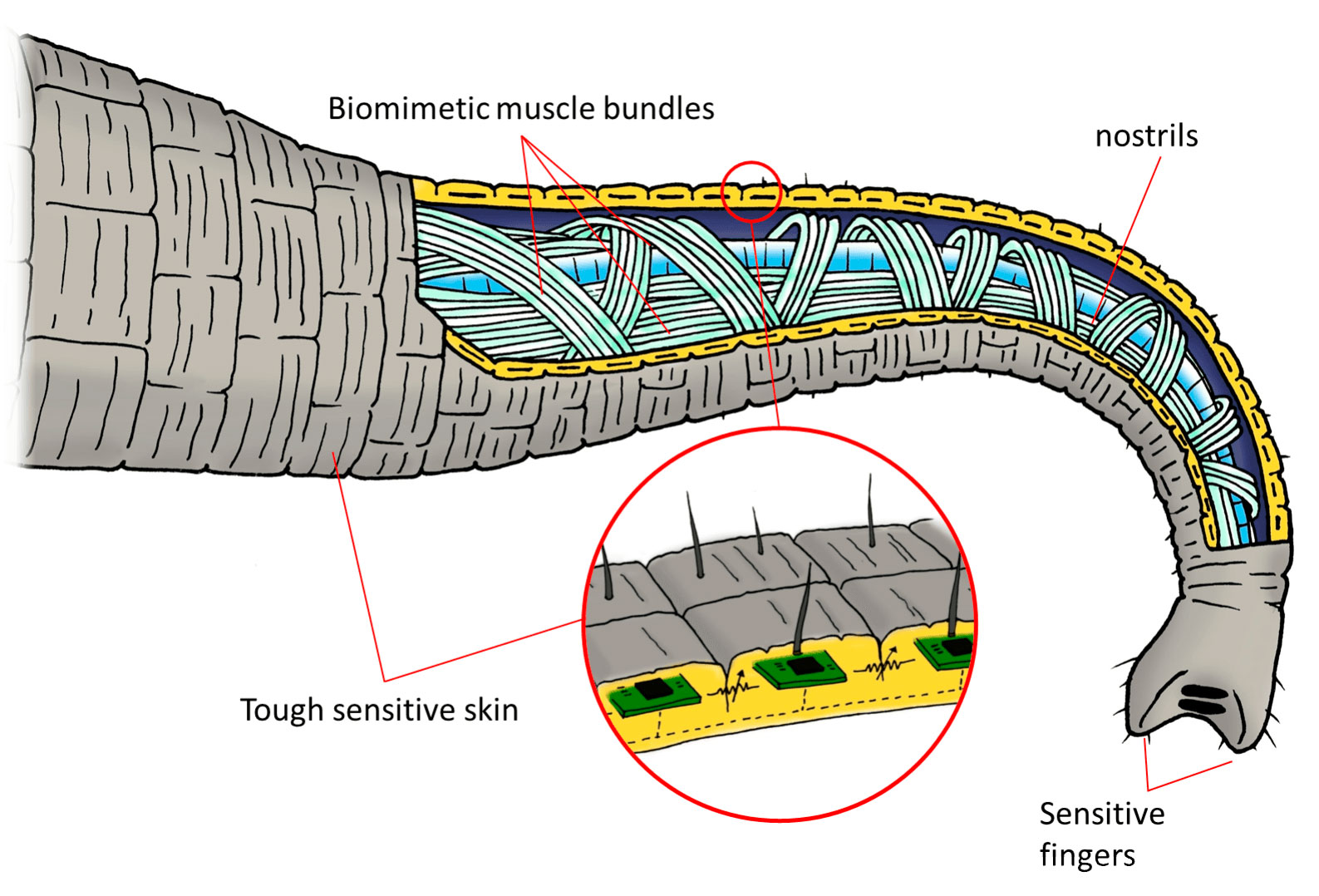
Dagenais, P., Hensman, S., Haechler, V., Milinkovitch, M. C., Elephants evolved strategies reducing the biomechanical complexity of their trunk, Current Biology. 2021, 31, 21, Pages 4727-4737. |
Read more |
Joe, S., Totaro, M., Wang, H., Beccai, L., Development of the Ultralight Hybrid Pneumatic Artificial Muscle: Modelling and optimization. PLOS ONE. 2021, 16, 4, e0250325. |
Read more |
Piqué, F., Kalidindi, H. T., Fruzzetti, L., Laschi, C., Menciassi A., Falotico, E., Controlling Soft Robotic Arms Using Continual Learning, in IEEE Robotics and Automation Letters. 2022, vol. 7, no. 2, pp. 5469-5476. |
Read more |
De Pascali, C., Naselli, G. A., Palagi, S., Scharff, R. B., Mazzolai, B., 3D-printed biomimetic artificial muscles using soft actuators that contract and elongate, Science Robotics. 2022, 7, 68. |
Read more |
S. Lantean, M. Lo Preti, L. Beccai, Stretchable reflective coating for soft optical waveguides and sensors, Soft Matter. 2022, 18, 7827-7837 |
Read more |
D. Cafiso, S. Lantean, F. Pirri, L. Beccai, Soft Mechanosensing via 3D Printing: A review, Adv. Intell. Syst. 2023, 2200373. |
Read more |
S. Joe, O. Bliah, S. Magdassi, L. Beccai, Jointless Bioinspired Soft Robotics by Harnessing Micro and Macroporosity, Adv. Sci. 2023, 2302080. |
Read more |
Kamare B., Lo Preti M., Bernardeschi I., Dagenais P., Milinkovitch M., Beccai L., Study and preliminary modeling of microstructure and morphology of the elephant trunk skin. 12th Int. Conf. on Biomimetic and Biohybrid Systems, Living Machines 2023
|
- Hits: 1844